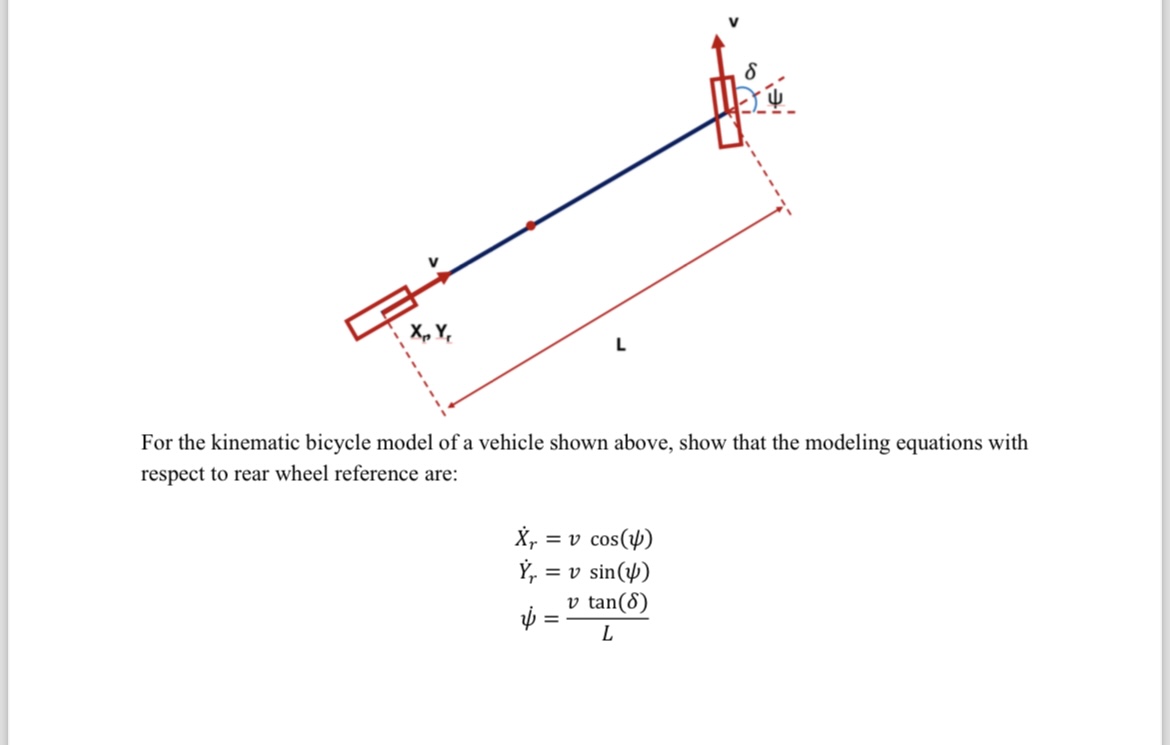
For the kinematic bicycle model of a vehicle shown above, show that the modeling equations with respect to rear wheel reference are:
\dot{x}_r = v \cos(\psi)
\dot{y}_r = v \sin(\psi)
\dot{\psi} = \frac{v \tan(\delta)}{L}
Resim, bir aracın üstten görünümünü ve bu aracın kinematik bisiklet modelini temsil eden bir diyagramı göstermektedir. Diyagramda, aracın ön tekerleğinin yönünü gösteren bir açı (\delta delta) ve aracın yönelim açısını (\psi psi) temsil eden vektörler bulunmakta. Ayrıca, aracın hızını (v v) ve arka tekerleğe göre referans alınan x_r, y_r konum koordinatlarını da göstermekte. Metinde, bu modelin kinematik denklemlerinin arka tekerlek referansına göre nasıl ifade edileceği açıklanıyor.