b) (17.5 points)
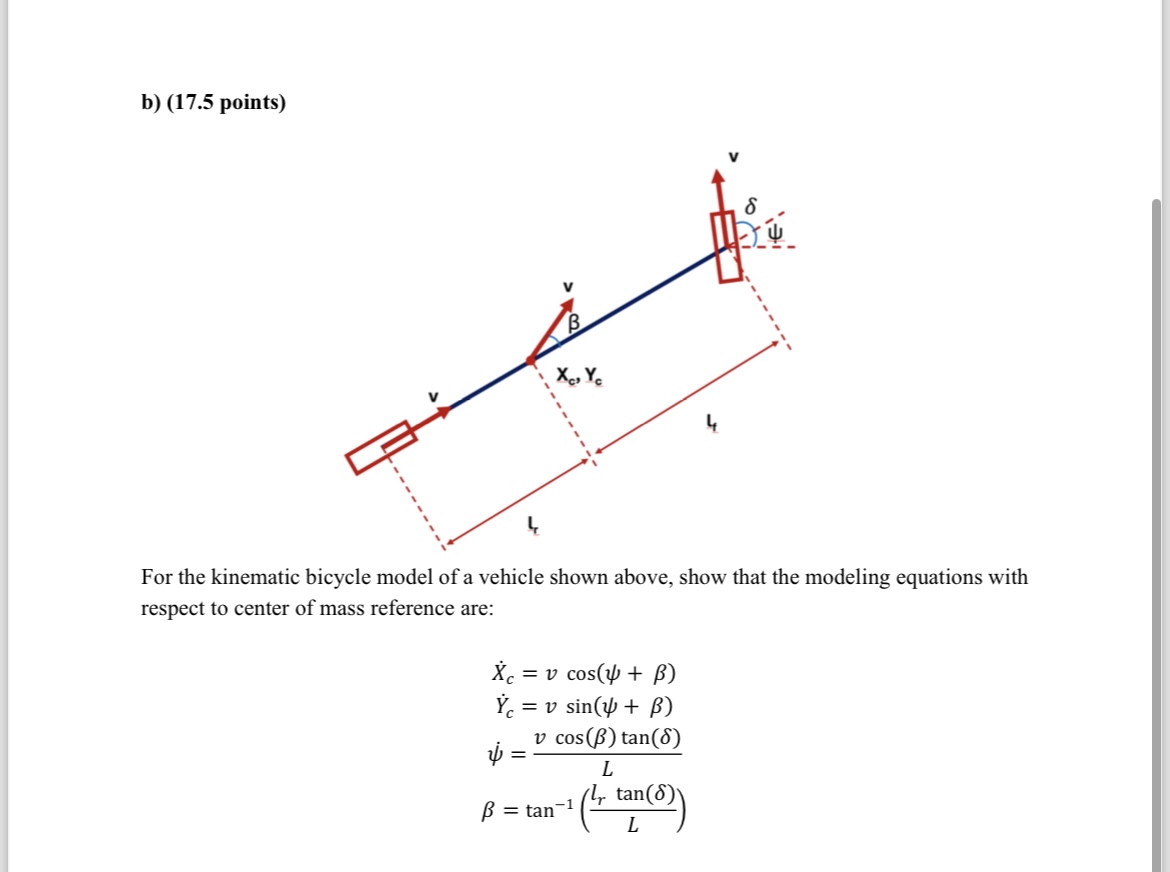
For the kinematic bicycle model of a vehicle shown above, show that the modeling equations with respect to center of mass reference are:
\dot{x}_c = v \cos(\psi + \beta)
\dot{y}_c = v \sin(\psi + \beta)
\dot{\psi} = \frac{v}{L} \cos(\beta) \tan(\delta)
\beta = \tan^{-1}\left(\frac{lr}{L} \tan(\delta)\right)
Resimde, bir aracın kinematik bisiklet modeli gösterilmektedir ve bu modelin kütle merkezine göre modellenen denklemleri verilmektedir. Bu denklemler, aracın konum ve yönelimini zamana göre nasıl değiştirdiğini ifade eder ve araç dinamiği ve kontrol sistemleri tasarımında kullanılır. Resimdeki modelde, v aracın hızını, L ve lr ise aracın dingil mesafelerini temsil eder; \psi aracın yönelim açısı, \beta kayma açısı ve \delta da ön tekerlerin dönüş açısını ifade eder.