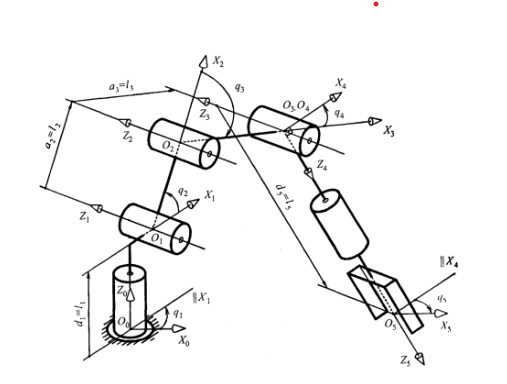
Robotik kolun şeması bu şekilde olacak. Bunun kinamatik denklemlerini açıklayarak çıkarabilir misin ve simulink simscape ile nasıl modelleyeceğimi detaylı bir şekilde anlatabilir misin
Elbette! 6 serbestlik dereceli (DoF) bir robotik kolun kinematik denklemlerini çıkarabilmek için Denavit-Hartenberg (DH) parametrelerini kullanabiliriz. Ardından bu parametreleri kullanarak Simulink Simscape ortamında nasıl modelleyebileceğinizi açıklayabilirim.
1. Denavit-Hartenberg Parametrelerini Belirleme
DH parametreleri dört temel parametre üzerinden belirlenir:
- θ_i (theta): Eksenler arası dönme açısı (i-1 ve i eksenleri arasında).
- d_i (d): Eksenler arası doğrusal uzaklık (i-1 ekseninden i eksenine kadar olan mesafe).
- a_i (a): Eksene dik uzunluk (i-1 ekseninden i eksenine kadar olan mesafe).
- α_i (alpha): Eksenler arası dönme açısı (i ekseninden i-1 eksenine kadar olan açı).
Robotik kolunuzun DH parametreleri şemayı dikkate alarak belirlenmelidir. Aşağıda bir örnek adım adım gösterilmiştir:
DH Parametri Tablosu
| Link | θ (dönme açısı) | d (doğrusal uzaklık) | a (eksene dik uzunluk) | α (dönme açısı) |
|---|---|---|---|---|
| 1 | θ_1 | d_1 | a_0 | α_0 |
| 2 | θ_2 | d_2 | a_1 | α_1 |
| 3 | θ_3 | d_3 | a_2 | α_2 |
| 4 | θ_4 | d_4 | a_3 | α_3 |
| 5 | θ_5 | d_5 | a_4 | α_4 |
| 6 | θ_6 | d_6 | a_5 | α_5 |
Not: Bu parametreler robot kolunun konfigürasyonuna göre değişebilir.
2. Kinematik Denklemler
Denavit-Hartenberg parametrelerine dayanarak kinematik denklemleri elde edebiliriz. Kinematik denklemler, her bir mafsal ve bağlantı parçası için 4x4 dönüşüm matrisleri kullanılarak elde edilir. Her bir dönüşüm matrisi şu şekildedir:
T_i =
\begin{bmatrix}
\cosθ_i & -\sinθ_i\cosα_i & \sinθ_i\sinα_i & a_i\cosθ_i \\
\sinθ_i & \cosθ_i\cosα_i & -\cosθ_i\sinα_i & a_i\sinθ_i \\
0 & \sinα_i & \cosα_i & d_i \\
0 & 0 & 0 & 1
\end{bmatrix}
Bu dönüşüm matrislerini çarparak toplam dönüşüm matrisini elde edebiliriz:
T = T_1 × T_2 × T_3 × T_4 × T_5 × T_6
Toplam dönüşüm matrisi, robot kolunun son efektörünün konum ve yönelimini tanımlar.
3. Simulink Simscape ile Modelleme
Adımlar:
-
SimMechanics/Simscape Kurulumu:
- MATLAB ve Simulink üzerinde Simscape Multibody ek aracını kurun.
-
Simscape Multibody Modeli Oluşturulması:
- Simulink ortamında yeni bir model oluşturun ve Simscape Multibody kitaplığından gerekli bileşenleri ekleyin.
-
Robotik Kolun Bağlantı ve Mafsallarının Modelleme:
- Her bir bağlantı parçası ve mafsal için Solid ve Revolute Joint bloklarını kullanarak robotik kolu modelleyin.
- Her mafsal için DH parametreleri doğrultusunda uygun dönüş ve yer değiştirme ayarlamalarını yapın.
-
DH Parametrelerinin Ayarlanması:
- Her Revolute Joint bloğunda, mafsal açısını (θ) tanımlayın.
- Solid blokları ile bağlantı parçalarının uzunluklarını (a ve d) tanımlayın.
-
Son Efektörün Tanımlanması:
- Robot kolunun son bağlantı parçasına eklemek istediğiniz bir yük varsa, bu yükü ekleyip son efektörün tanımlanmasını sağlayın.
-
Simulasyon ve Kontrol:
- Simulasyon sırasında robot kolunun hareketlerini kontrol etmek için Joint Actuator blokları kullanarak her bir mafsalı kontrol edebilirsiniz.
- Gerekli kontrol algoritmalarınızı uygulamak için PID veya diğer kontrol yöntemlerini kullanabilirsiniz.
Örnek MATLAB Simulink Kodu:
% Yeni bir model oluşturma
model_name = 'robotic_arm_model';
new_system(model_name);
open_system(model_name);
% Simscape Multibody bileşenlerinin eklenmesi
add_block('smimport','Import','ImportFcn',@(x)import_cad('robotic_arm.sldxml'));
save_system(model_name);
Bu genel adımlarla 6 serbestlik dereceli robotik kolunuzun Simulink ve Simscape ortamında modellemesini yapabilirsiniz. Her bir bağlantı ve mafsalın doğru modellenmesi, DH parametreleri doğrultusunda yapılmalıdır. Gerekli kontrol algoritmaları ile robot kolunun hareketlerini kontrol edebilirsiniz.